以S1-9296或S4-9296的2号通道(A口)为例:
第一步:
1. 在程序安装目录的./config文件夹下创建新的文件夹,文件夹的名称模板为 :"待增模组名称_分辨率_帧率_位深_MIPI Lane数",
在此新文件夹下需要包括点亮模组所需的配置文件,如只连接点亮一个模组需要包括两个文件:
● 模组名称_分辨率_帧率_位深_Lane数_init.json
● 模组名称_分辨率_帧率_位深_Lane数_A.json
▶ 请严格按照此文件命名规则,UGrab Studio以此命名规范自动识别。
如下图:


第二步:
配置*_init.json文件,*_init.json文件分为几个部分:
(1)i2c-map:

关于参数的具体解析,可以观看论坛的ecFG S*-9296系列配置视频_基础篇(二)ecFG S*-9296系列配置视频_基础篇(二) | OpenNCC-Robotic Cam (eyecloudai.com),此教程只讲解如何配置;
i2c-map部分包含的是slave address,
<a>slave0映射的是加串芯片,需要修改的参数为physical-addr,virtual-addr与type;
◆ physical-addr需要根据加串芯片手册来配置,以Max 9295为例,可询问硬件工程师来确定,需要注意的是表中的通讯地址是8位,而配置文件中需要的是7位通讯地址,要注意转换,比如例子模组需要的参数是0xC4,写到配置文件中就应该位0x62即可;

◆ virtual-addr需要确认解串芯片是否具有虚拟地址功能,需要查看芯片手册或者咨询FAE即可,不具有虚拟地址功能一般设置为0xFF即可;
type为协议数据类型,根据需要进行配置即可,一般默认为16_8j即可;(ecFG SDK暂不支持16_16数据类型,需要支持请联系FAE);

<b>在slave1中,需要修改的为physical-addr,virtual-addr与type;
◆ physical-addr需要查看模组手册的slave addre进行配置,需要注意通讯地址是7位还是8位,配置文件需要的是7位通讯地址,
◆ virtual-addr的配置只要不与其他物理地址与虚拟地址冲突即可,通讯地址为7位;
◆ type配置与slave0相同即可。
(2)MIPI-DPHY:
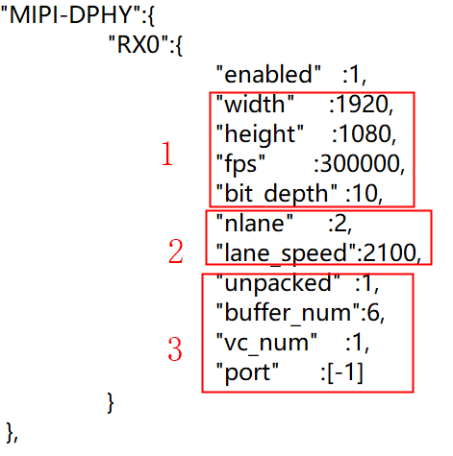
<a>第一部分与添加模组的需求参数相关,需要配置出图的宽高,帧率FPS(300000的含义为30.0000帧),位深为图像的位深;
<b>第二部分中的nlane目前只支持2lanes,后续增加其他Lane数另作说明,lane_speed需要根据sensor的输出速率来决定,一般接收要大于Sensor的输出速率,但是最多不超过2500,即2.5Gbps;
<c>第三部分与点亮无关,具体解释询问FAE,使用默认参数即可。
(3)program:
此部分采用UGrab Studio的出图配置工具生成即可;目前配置生成工具有两种方式:

<a>采用UGrab Studio的出图配置中的解串配置生成:填写分辨率,输出图像的格式,位深,速率,Lan数然后点击保存文件,保存后的文件结构与*_init.json文件相同,但是不可直接使用,其中有program部分,即为所需,复制到program中即可

<b>使用UGrab Studio中的解串配置生成工具:填写lane数,速率,位深, 点击生成即可,然后复制粘贴到*_init.json文件对应字段中,至此*_init.json文件配置完成。

第三步:
配置*_A.json文件:
*_A.json文件中只包含program部分,其中program部分分为几个部分:

<a>第一部分黑色框为*_A.json文件的通道选择,一般无需修改;
<b>第二部分绿色框为硬件上电、复位时序,需要咨询模组厂,如果暂时不知,则可以先去掉此部分;如果其他部分没有问题时,模组无法跑通,再添加调试;
<c>第三部分蓝色框与*_init.json文件中的slave1的物理地址与虚拟地址相关,0x0045为其物理地址,但是要注意寄存器值的位数转换,*_A.json文件的0x0045的寄存器值位8位,*_init.json文件中的slave1的物理地址与虚拟地址为7位;0x0044为虚拟地址的第一个地址值;
<d>第四部分黄色框使用如果图像数据类型与模板相同,默认即可,无需修改,如果不同则要修改0x0318,数值参考数据手册;
<e>第五部分红色框为sensor配置部分,按照点亮参数进行配置即可。但是要注意数据类型转换(寄存器地址为16位,寄存器值位8位,如果sensor的配置文件中寄存器值位16位,则要分成两个8位,如寄存器值为0x2058,则要拆分成0x20,0x58),在配置此部分时要根据芯片手册注意大小端;至此*_A.json文件配置完成。
第四步:
当*_init.json与*_A.json文件配置完成后,就可以运行UGrab Studio.exe点亮待增模组,点亮的具体流程根参考官网论坛中的“如何开始使用UGrab”来进行操作即可。